概要
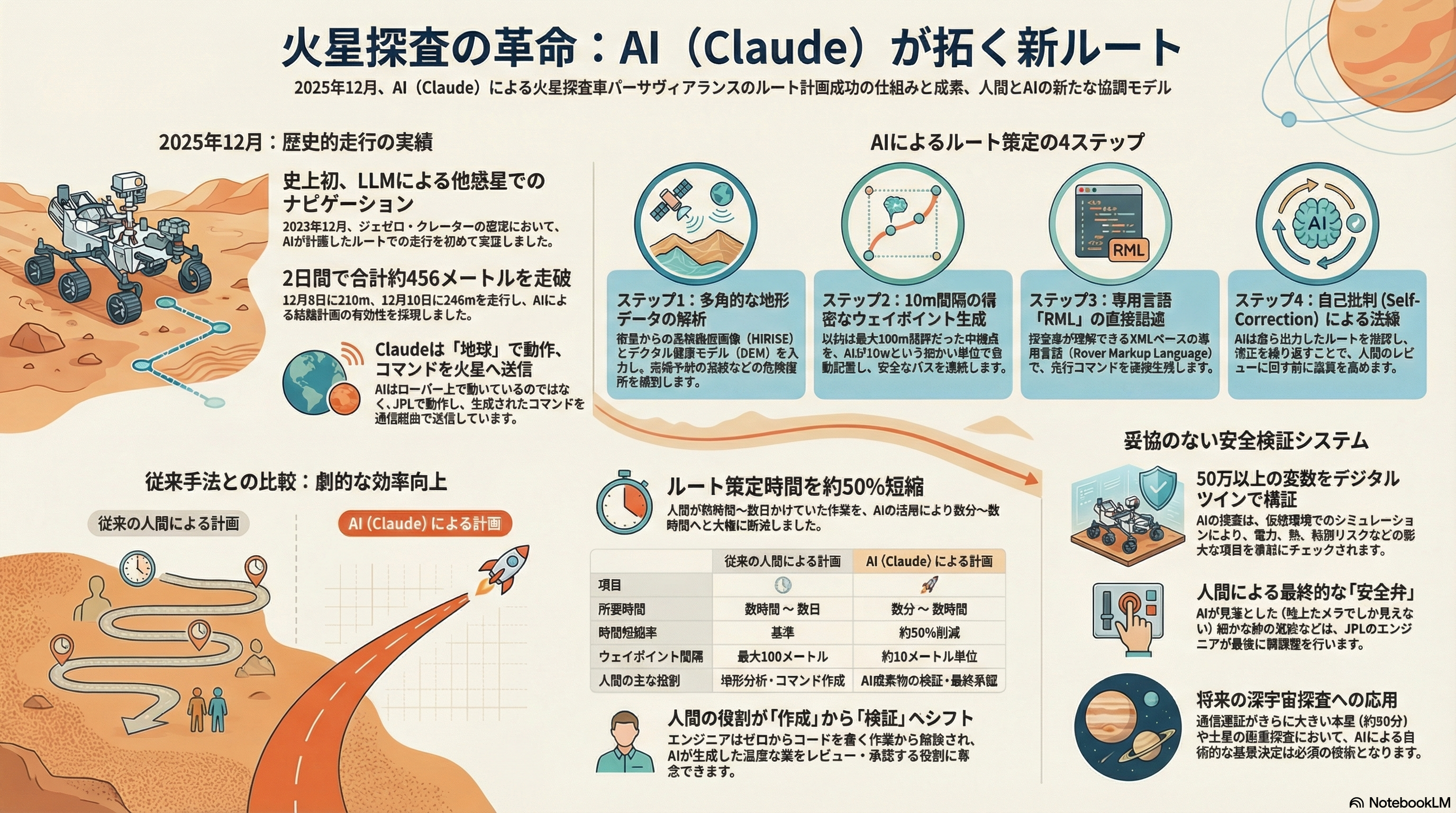
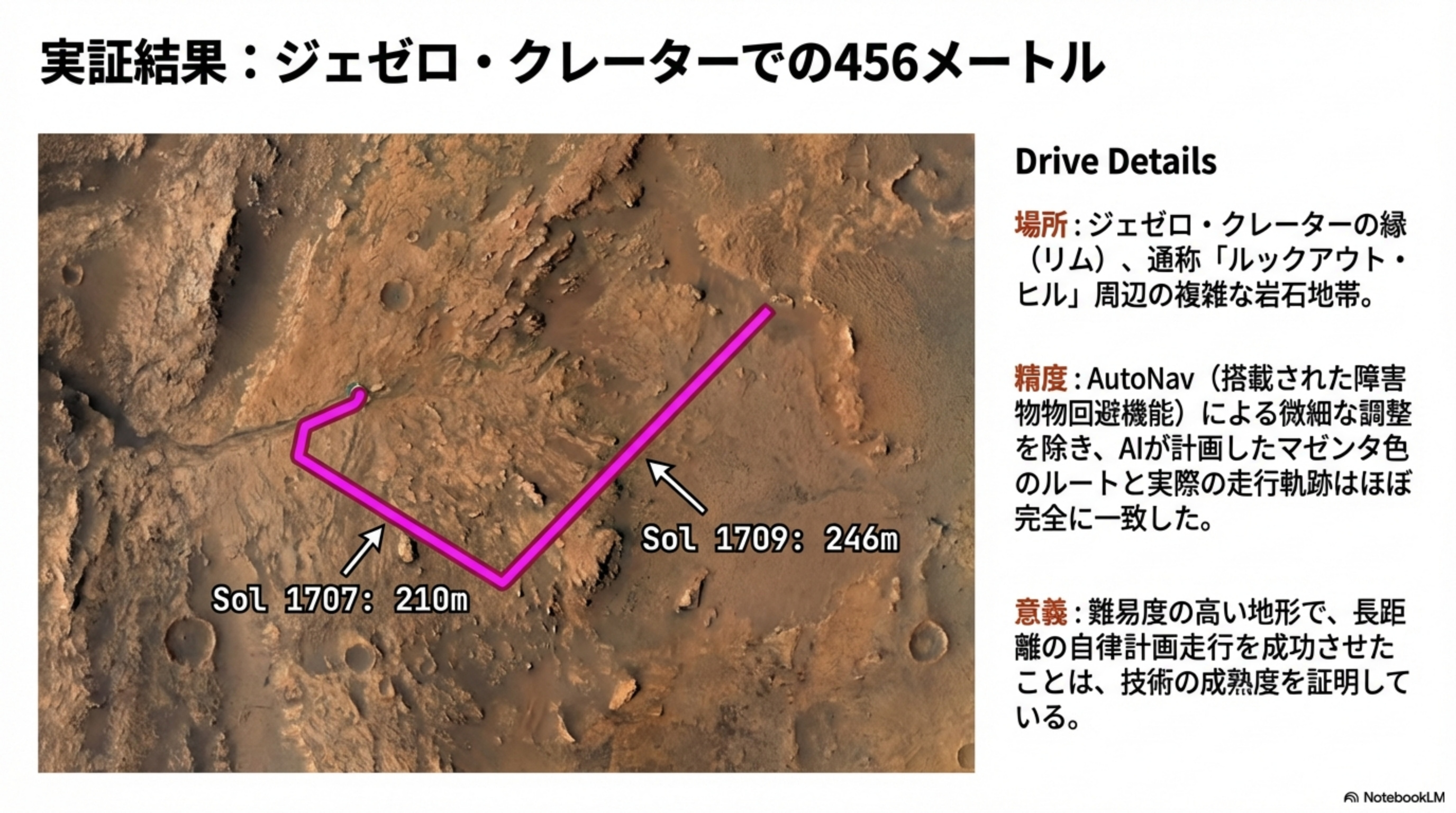
2025年12月、NASAの火星探査車「パーサヴィアランス(Perseverance)」が、AnthropicのAIモデル「Claude」によって計画されたルートで約400メートルの走行に成功しました。これはLLM(大規模言語モデル)が地球外でナビゲーション計画を担った史上初の事例です。
参照: NASA JPL公式ニュース
参照: NASA JPL公式ニュース
"This is a historic milestone - the first time an AI has planned navigation on another planet."
~400m
AI計画ルートでの走行距離
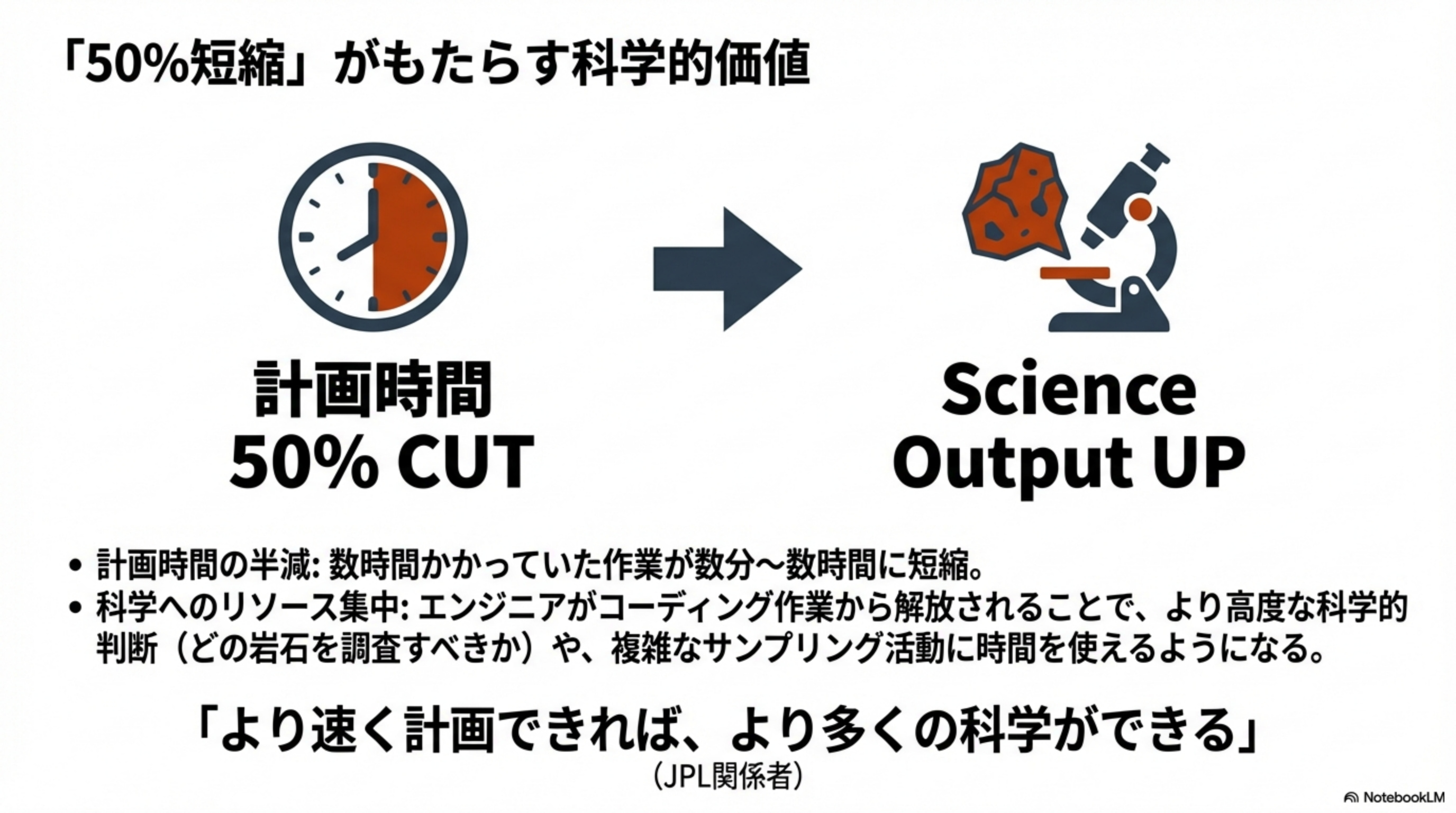
~50%
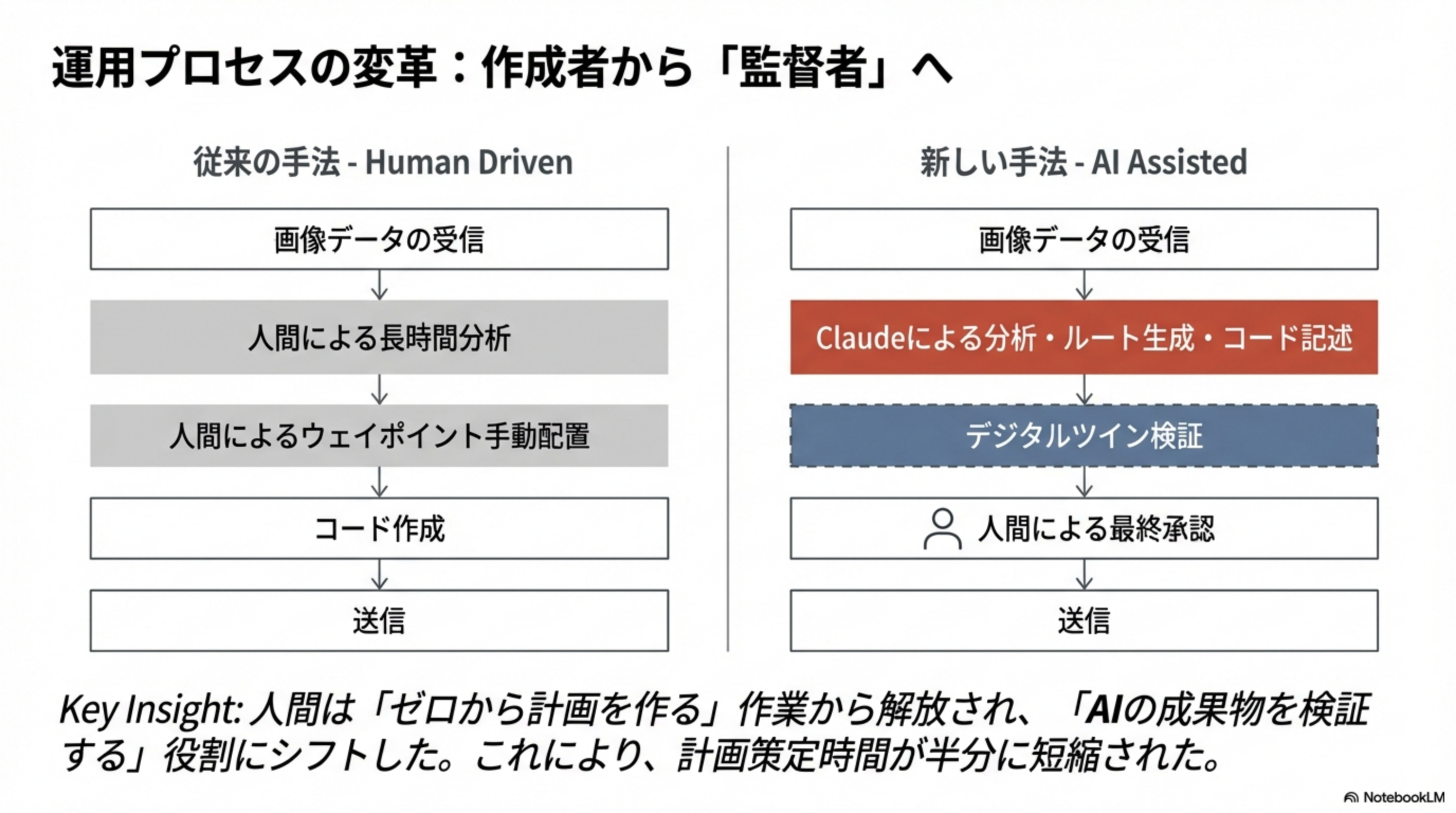
ルート策定時間の短縮
Claude
Anthropic AIモデル使用
史上初
LLMによる地球外ナビゲーション
技術的な仕組み
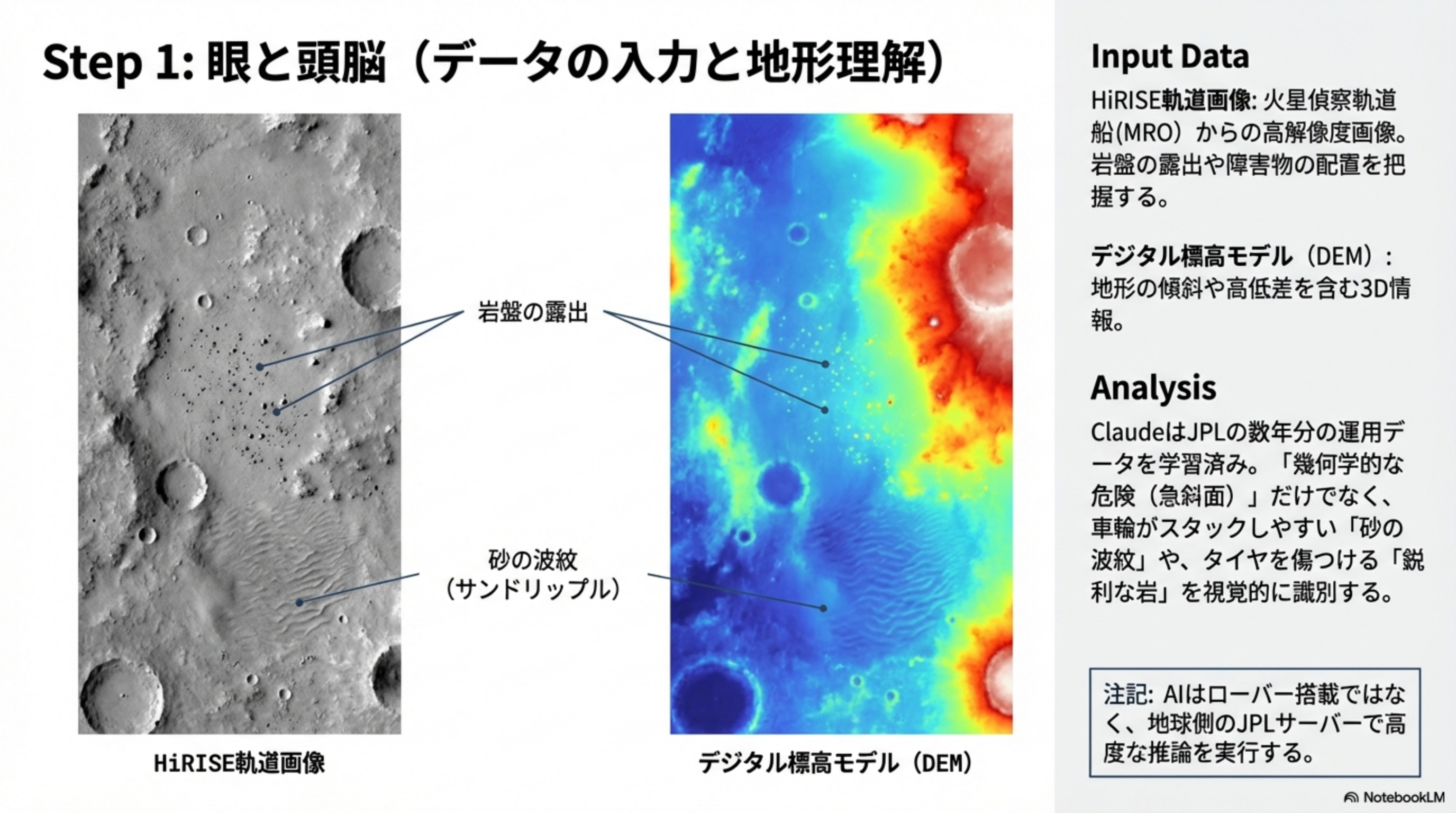
🛰 データ分析
- 軌道画像の解析
- 地形データの評価
- 障害物の識別
- 安全な経路の構築
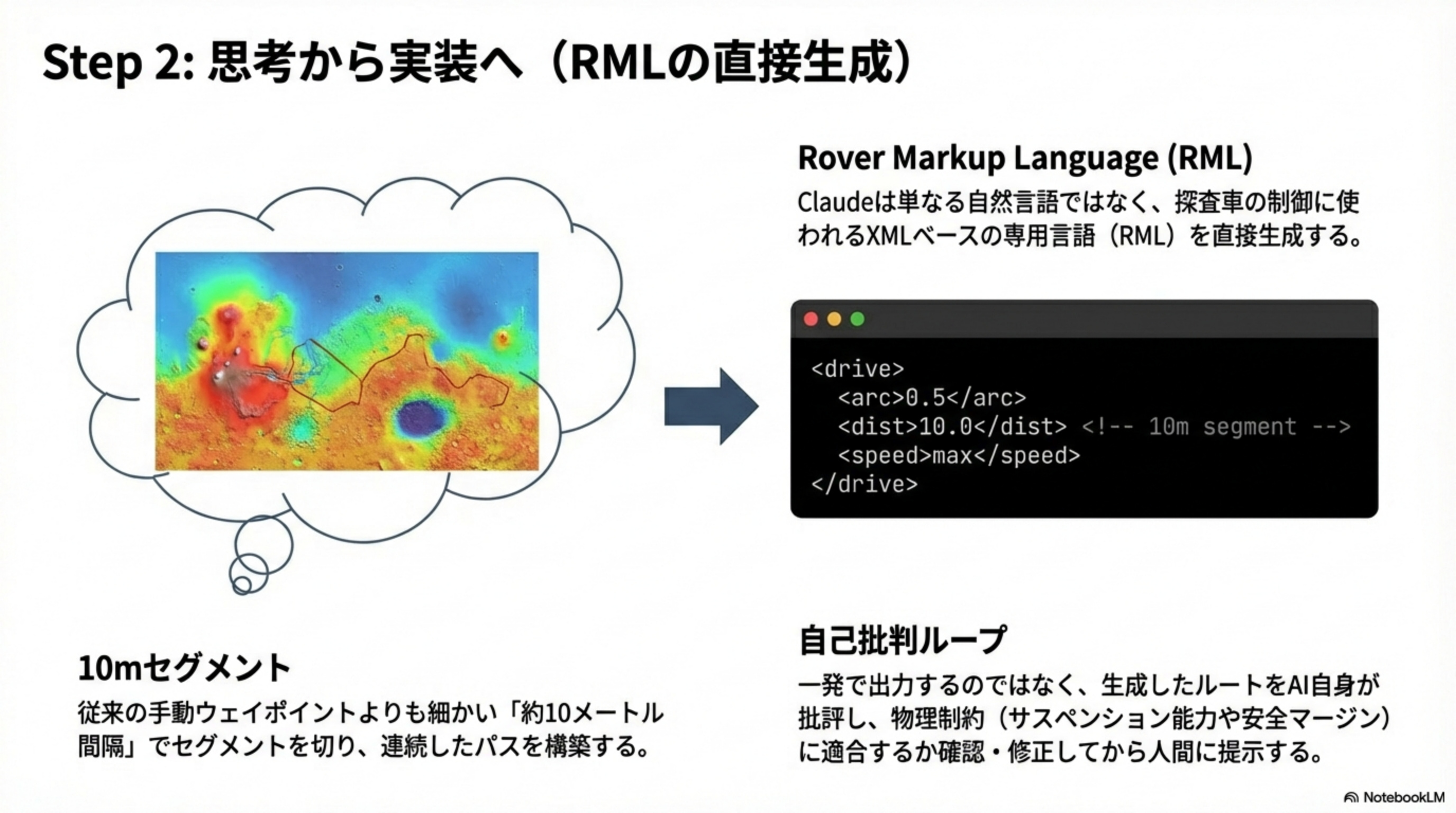
💻 コード生成
- RML(Rover Markup Language)を直接生成
- 探査車制御コマンドの自動作成
- 従来の手作業プロセスを自動化
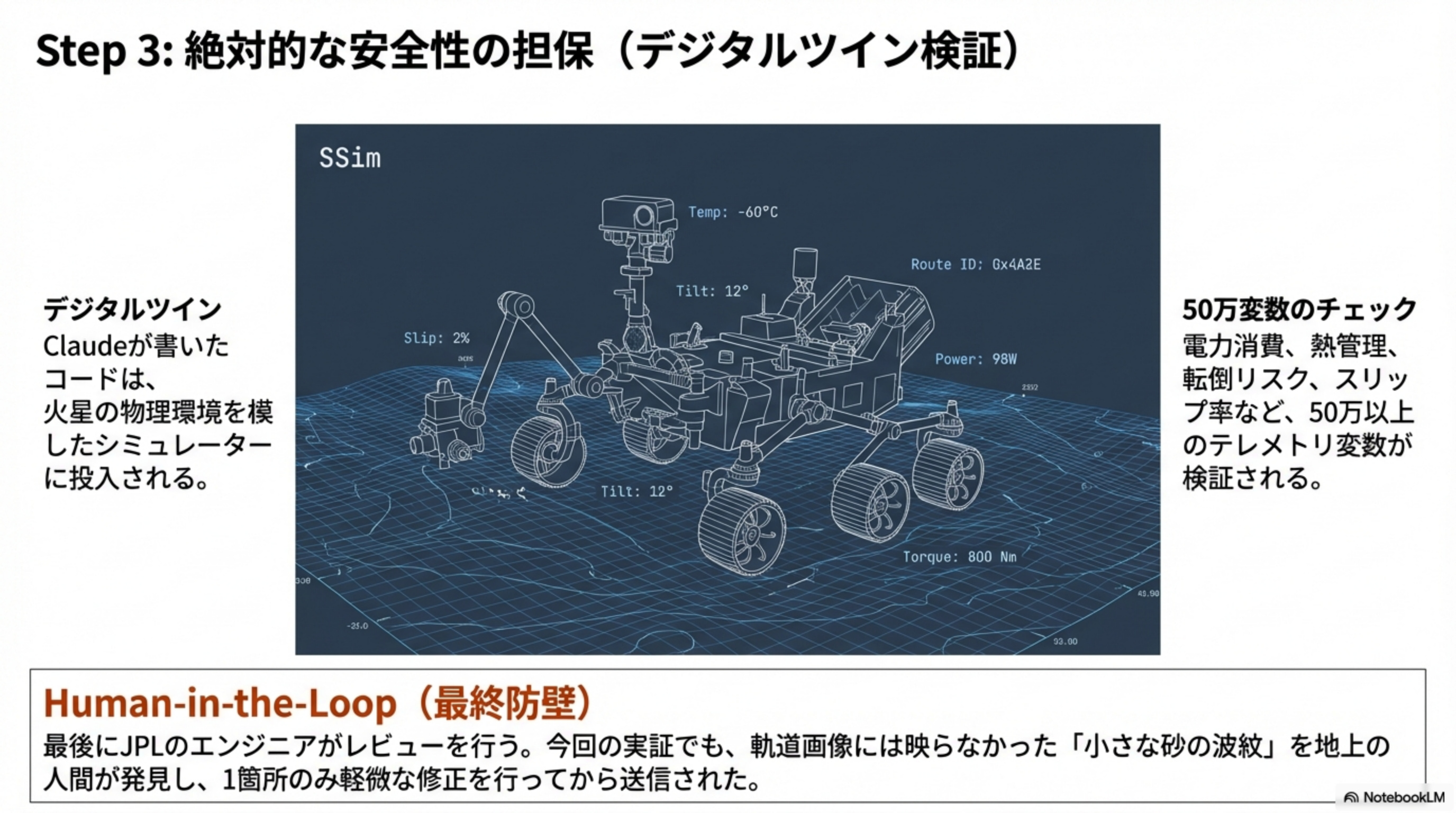
🛡️ 安全性確保
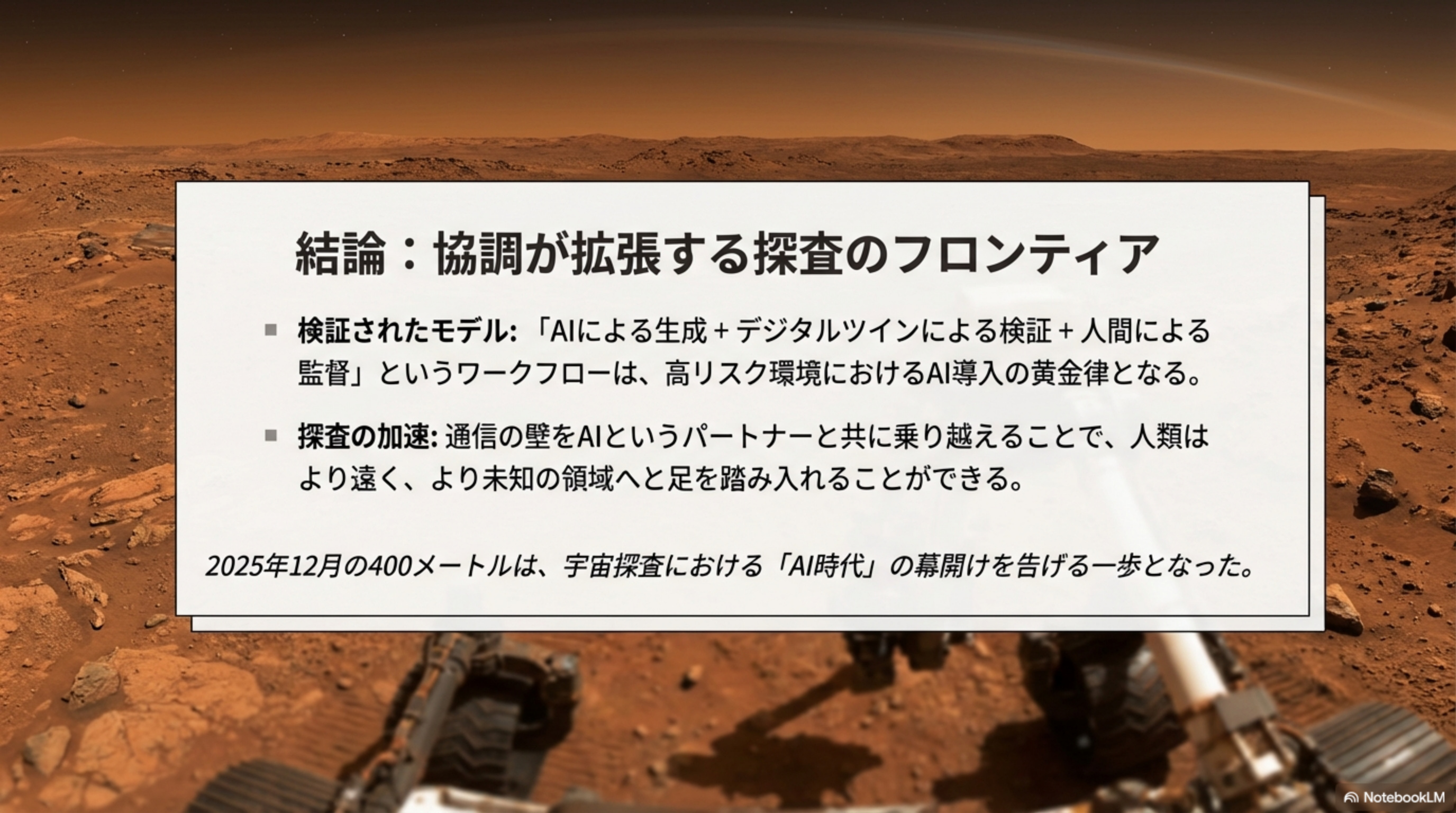
- 「デジタルツイン」による厳格なシミュレーション
- 人間の承認プロセス
- 多層的な検証システム
Claudeは軌道画像や地形データを分析して安全な経路を構築し、探査車を制御するコード(RML)を直接生成しました。これにより、従来人間が手作業で行っていたルート策定時間が約50%短縮されました。
宇宙探査への影響
🚀
ミッション効率化
計画時間の大幅短縮
計画時間の大幅短縮
🌐
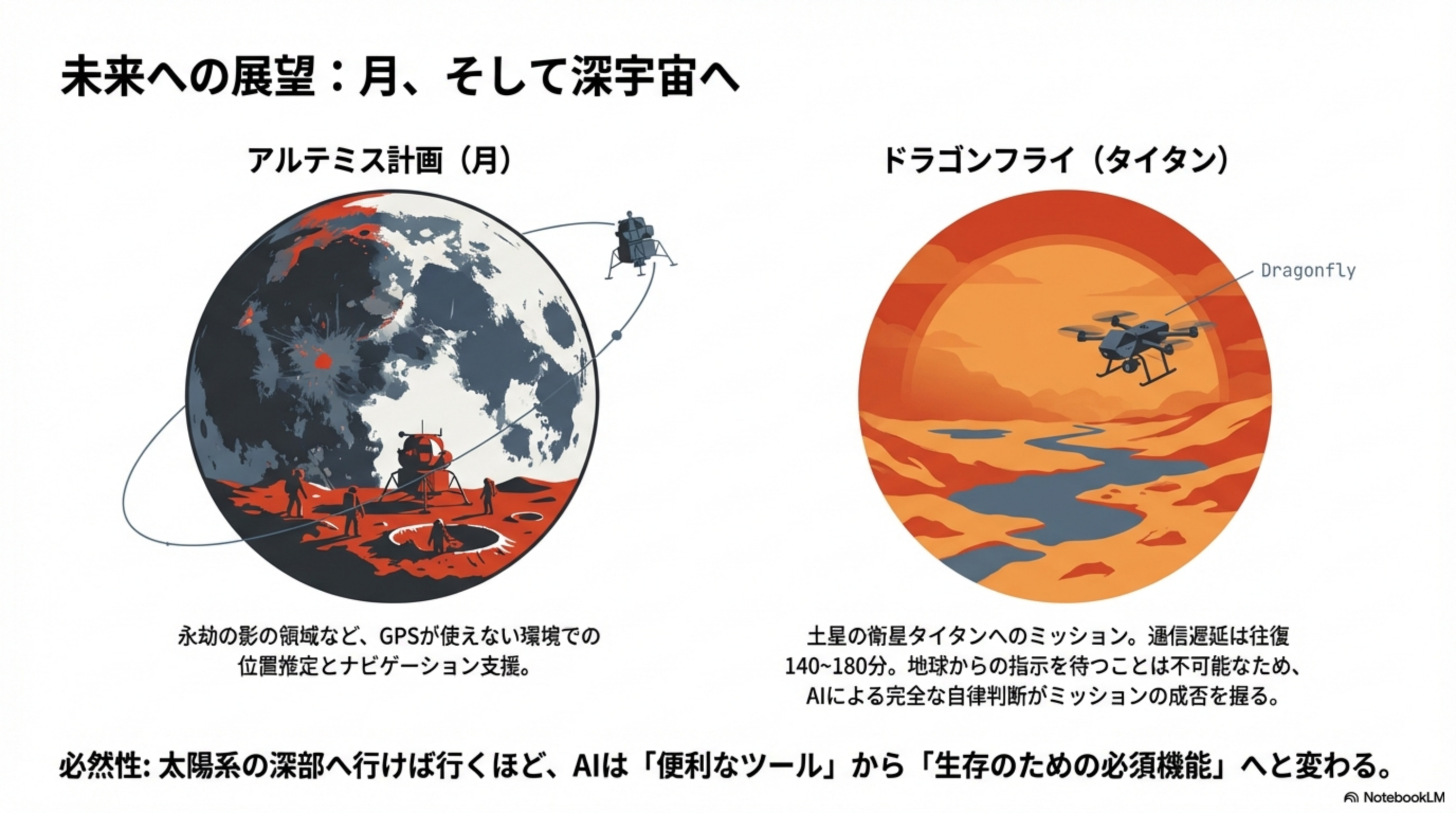
深宇宙探査への応用
通信遅延への対応
通信遅延への対応
🧬
自律的判断
リアルタイム経路修正
リアルタイム経路修正
🔬
科学探査の加速
より多くの調査が可能に
より多くの調査が可能に
🎉 今後の展望
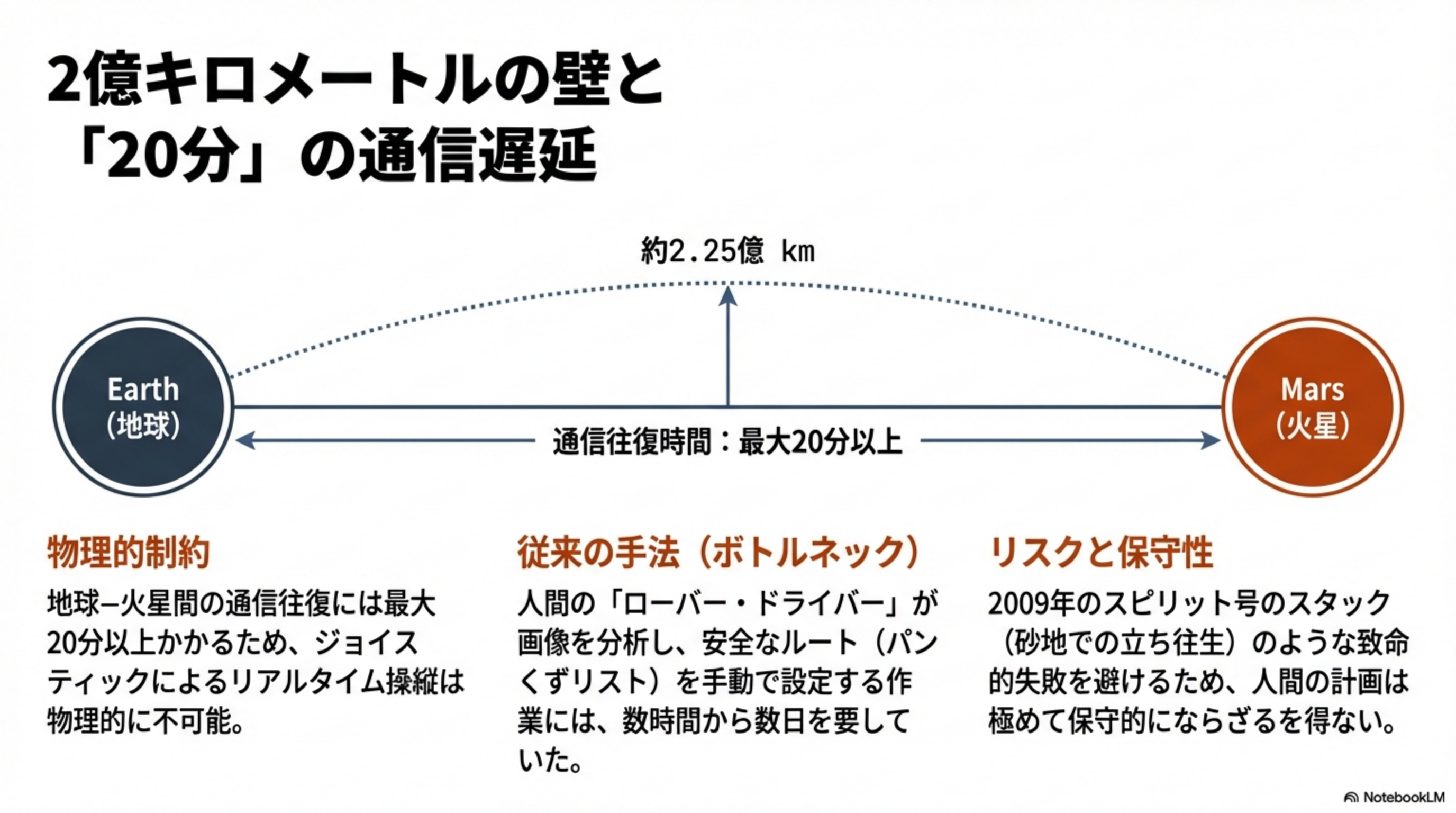
- 火星-地球間の通信遅延(約20分)への対応としてAI自律性の重要性が増大
- 将来の有人火星ミッションでのAI支援ナビゲーション
- 木星や土星の衛星探査への応用可能性
- 月面探査ミッションでのAI活用拡大
スライド資料 (全12ページ)